Arduino
Při konstrukci trupu a jeho velikosti jsme museli počítat s jedním klíčovým parametrem - velikostí elektroniky uvnitř lodi. Vzhledem k přístupnosti a napodobitelnosti naší práce pro ostatní jsme zvolili vývojovou platformu Arduino UNO. Toto není nejlepší řešení, protože se jedná o platformu na vývoj, což znamená běžný přístup a testy, nikoliv ostré provozní nasazení.
Šířka trupu proto byla upravena tak, aby se tam tato deska dostala vodorovně, bez nahnutí. Na trupu jsme vytvořili podložky, na které jsme plánovali dáti suchý zip pro lepší manipulaci.
Realizace elektroniky uvnitř se nám ovšem nepovedla. Největší selhání nastalo na tom, že jsme nebyli schopni propojit naše dva kartáčkové motory skrze obal lodních šroubů.
Zároveň se nám i při manipuaci narušil jejich povrch, tudíž by do modelu skoro jistě zatékalo.
Ukázka obvodů, co jsme měli připravené.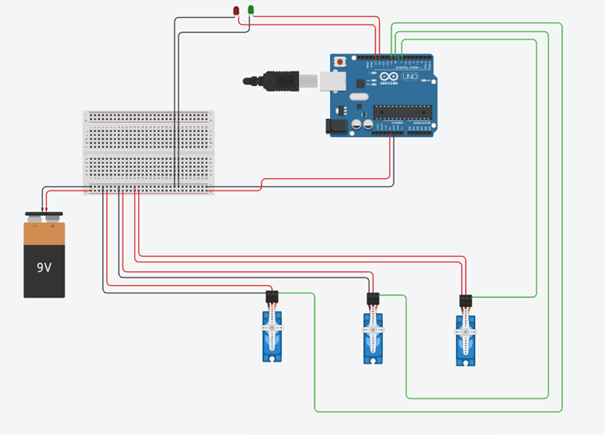
Praktické zapojení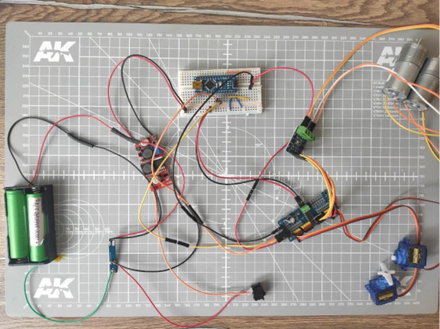
Počítali jsme se zapojením 2 LED diod po stranách (zelené a červené), jak tomu mají opravdové lodě na moři nebo také zvukový reproduktor na náznaky střelby s lodi. Samotné lodní šrouby jsme také chtěli vytisknout a poté spojit přes ložisko. Toto řešení opět skončilo v teoretické rovinně, jelikož udělat vodotěsnou verzi se nám nepodařilo.
Buď těsnilo a netočilo se, nebo naopak…